| CARVIEW |
Select Language
HTTP/1.1 301 Moved Permanently
Date: Fri, 16 Jan 2026 10:04:58 GMT
Server: Apache/2.4.56 (Debian)
Set-Cookie: pll_language=en; expires=Sat, 16 Jan 2027 10:04:58 GMT; Max-Age=31536000; path=/; secure; SameSite=Lax
Expires: Fri, 16 Jan 2026 11:04:58 GMT
Cache-Control: max-age=3600
X-Redirect-By: Polylang
Location: https://roboception.com/software-tools/urcap/
Content-Length: 0
Content-Type: text/html; charset=UTF-8
HTTP/1.1 200 OK
Date: Fri, 16 Jan 2026 10:04:58 GMT
Server: Apache/2.4.56 (Debian)
Vary: Accept-Encoding
Content-Encoding: gzip
Content-Length: 16534
Content-Type: text/html; charset=UTF-8
Roboception - URCap
Skip to content
Roboception URCap – Plug-and-Play Installation and Usage
The integration of our 3D Stereo Vision products with your Universal Robot is easy: We have developed the Roboception URCap that enables a plug-and-play installation and usage. This element is available for download free of charge (in our Knowledge Base) or can be delivered on a USB key.
Roboception’s URCap requires PolyScope version 3.12.0 (or higher) for CB-Series robots or version 5.6.0 (or higher) for E-Series robots.
What is a URCap?
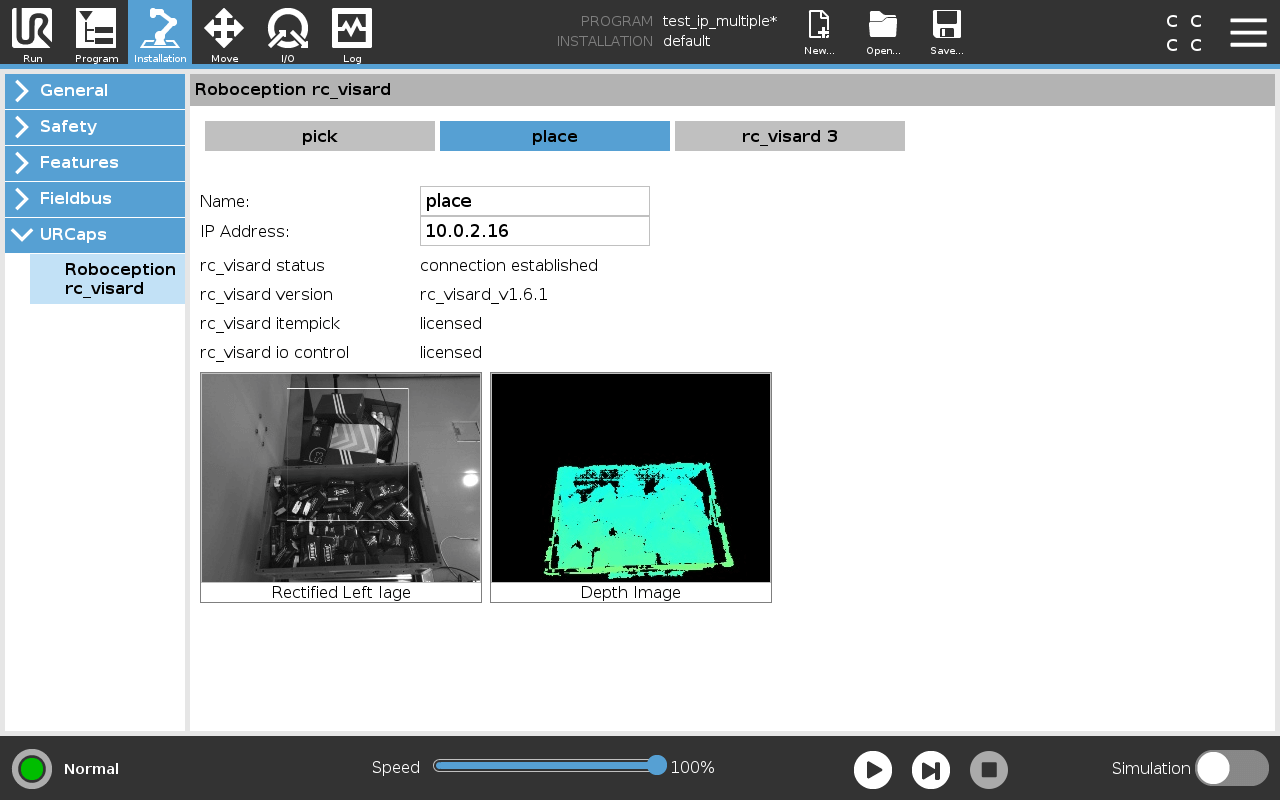
A URCap serves as a Java-based plugin seamlessly integrated into PolyScope, the graphical programming interface designed for Universal Robots. Its purpose lies in expanding the capabilities of PolyScope, offering users the ability to craft user-friendly programming screens for configuring hardware or generating new programming templates tailored to tasks like packaging and remote management operations.
The primary components of a URCap comprise a setup screen known as the Installation Node and a multitude of program commands referred to as Program Nodes. These elements coexist with the built-in UR nodes, enabling users to configure both the robot program and its application in tandem.
Installation Nodes typically handle general settings and the application environment, encompassing aspects like end-effectors, conveyors, and coordinate systems. On the other hand, Program Nodes execute specific commands at designated times or within a program sequence, such as moving to a specific position, closing a gripper, or relocating with a grasped object.
Tutorials for the Roboception URCap
In our Universal Robots Tutorials you can learn step by step how to connect, configure and use the rc_visard or rc_cube with a UR robot. The tutorials cover everything you need to know to easily get started with your robot vision solution for your UR robot:
Documentation & Download
For more detailed information about our products and our software tools for your robot vision solution, please visit our Knowledge Base:
Contact Us
Free Feasibility & Demo
You would like to find out whether our portfolio is suitable for your robotic application? Simply request a feasibility study free of charge, and get a live demo of our products.
Try & Buy
Would you like to try out one of our sensors and software solutions? Our Try-&-Buy-option gives you the chance to test our products before you decide, and to be sure you make the right choice for your application.