You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Important: Before starting, change the runtime to GPU.
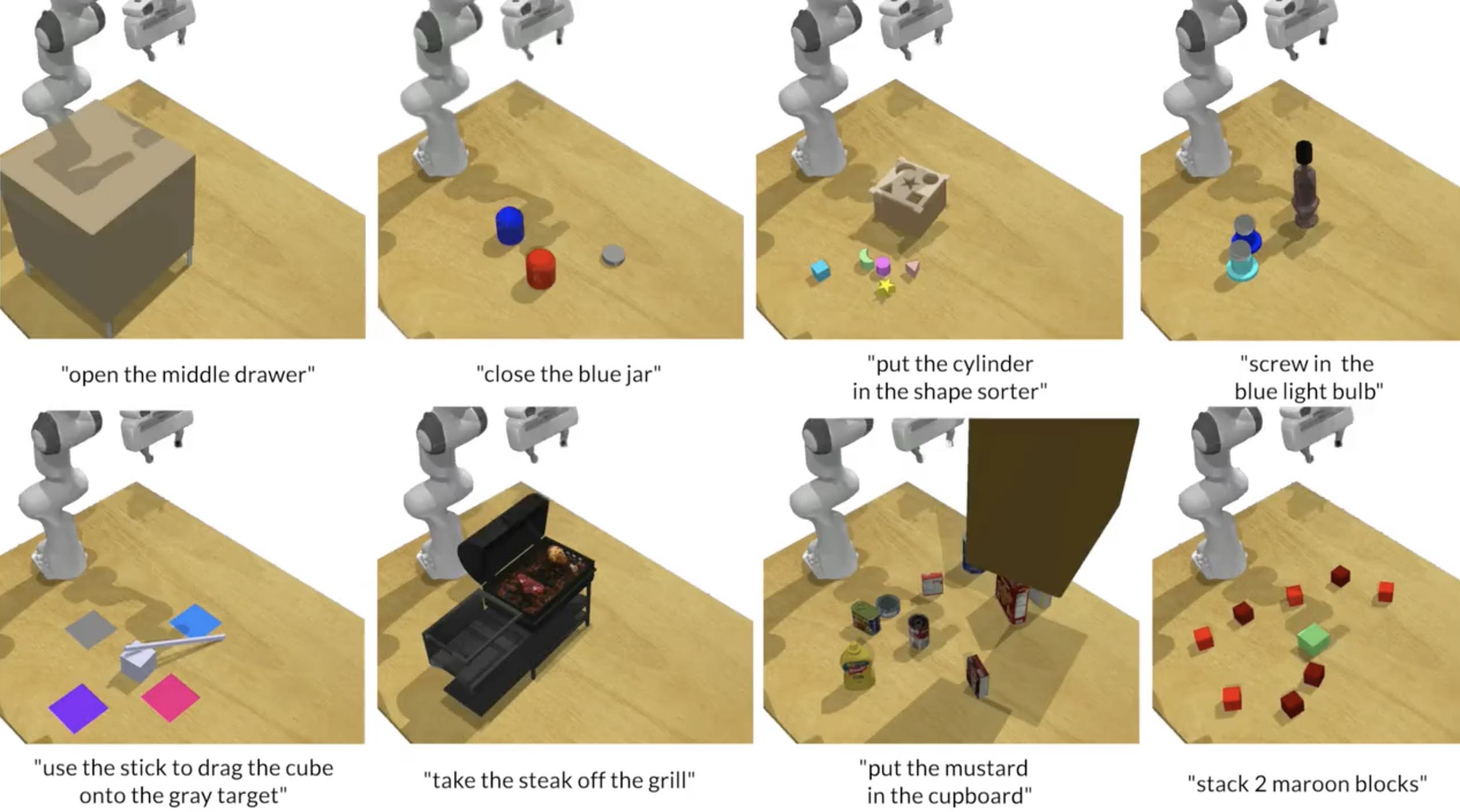
This notebook is an annotated tutorial on training Perceiver-Actor (PerAct) from scratch. We will look at training a single-task agent on the open_drawer task. The tutorial will start from loading calibrated RGB-D images, and end with visualizing action detections in voxelized observations. Overall, this guide is
meant to complement the paper by providing concrete implementation details.
@inproceedings{shridhar2022peract,
title = {Perceiver-Actor: A Multi-Task Transformer for Robotic Manipulation},
author = {Shridhar, Mohit and Manuelli, Lucas and Fox, Dieter},
booktitle = {Proceedings of the 6th Conference on Robot Learning (CoRL)},
year = {2022},
}
C2FARM
@inproceedings{james2022coarse,
title={Coarse-to-fine q-attention: Efficient learning for visual robotic manipulation via discretisation},
author={James, Stephen and Wada, Kentaro and Laidlow, Tristan and Davison, Andrew J},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={13739--13748},
year={2022}
}
PerceiverIO
@article{jaegle2021perceiver,
title={Perceiver io: A general architecture for structured inputs \& outputs},
author={Jaegle, Andrew and Borgeaud, Sebastian and Alayrac, Jean-Baptiste and Doersch, Carl and Ionescu, Catalin and Ding, David and Koppula, Skanda and Zoran, Daniel and Brock, Andrew and Shelhamer, Evan and others},
journal={arXiv preprint arXiv:2107.14795},
year={2021}
}
RLBench
@article{james2020rlbench,
title={Rlbench: The robot learning benchmark \& learning environment},
author={James, Stephen and Ma, Zicong and Arrojo, David Rovick and Davison, Andrew J},
journal={IEEE Robotics and Automation Letters},
volume={5},
number={2},
pages={3019--3026},
year={2020},
publisher={IEEE}
}