You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
roscd iris/../../../
# download sample data to here (orb_voceb.dbow, kitti_00.pcd, kitti_00_stereo.bag)
ls # > build devel install src orb_vocab.dbow kitti_00.pcd kitti_00_stereo.bag
roslaunch iris stereo_kitti00.launch
roslaunch iris rviz.launch # (on another terminal)
rosbag play kitti_00_stereo.bag # (on another terminal)
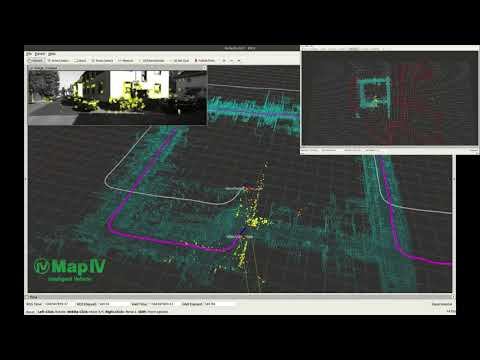
If the estimated position is misaligned, it can be corrected using 2D Pose Estimate in rviz.
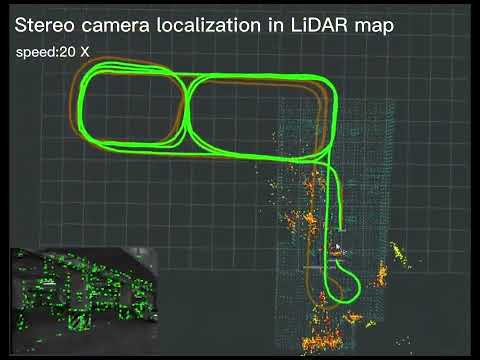
Monocular camera sample
roscd iris/../../../
# download sample data to here (orb_voceb.dbow, kitti_00.pcd, kitti_00_stereo.bag)
ls # > build devel install src orb_vocab.dbow kitti_00.pcd kitti_00_stereo.bag
roslaunch iris mono_kitti00.launch
roslaunch iris rviz.launch # (on another terminal)
rosbag play kitti_00_stereo.bag # (on another terminal)
If the estimated position is misaligned, it can be corrected using 2D Pose Estimate in rviz.
Config file for iris such as config/sample_iris_config.yaml
(only if you use OpenVSLAM) Config file for vSLAM such as config/sample_openvslam_config.yaml
Run
roslaunch iris openvslam.launch iris_config_path:=...
rosbag play yours.bag # (on another terminal)
License
Iris is provided under the BSD 3-Clause License.Modifications are underway.
The following files are derived from third-party libraries.
iris/src/optimize/types_gicp.hpp : part of g2o (BSD)
iris/src/optimize/types_gicp.cpp : part of g2o (BSD)
iris/src/pcl_/correspondence_estimator.hpp : part of pcl (BSD)
iris/src/pcl_/correspondence_estimator.cpp : part of pcl (BSD)
iris/src/pcl_/normal_estimator.hpp : part of pcl (BSD)
iris/src/pcl_/normal_estimator.cpp : part of pcl (BSD)
Reference
T. Caselitz, B. Steder, M. Ruhnke, and W. Burgard, “Monocular camera localization in 3d lidar maps,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2016, pp. 1926–1931.