You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
DynamicCity: Large-Scale 4D Occupancy Generation from Dynamic Scenes
Hengwei Bian1,2,*Lingdong Kong1,3Haozhe Xie4Liang Pan1,†,‡Yu Qiao1Ziwei Liu4 1Shanghai AI Laboratory
2Carnegie Mellon University
3National University of Singapore
4S-Lab, Nanyang Technological University
*Work done during an internship at Shanghai AI Laboratory
†Corresponding author
‡Project lead
Urban scene generation has been developing rapidly recently. However, existing methods primarily focus on generating
static and single-frame scenes, overlooking the inherently dynamic nature of real-world driving environments. In this
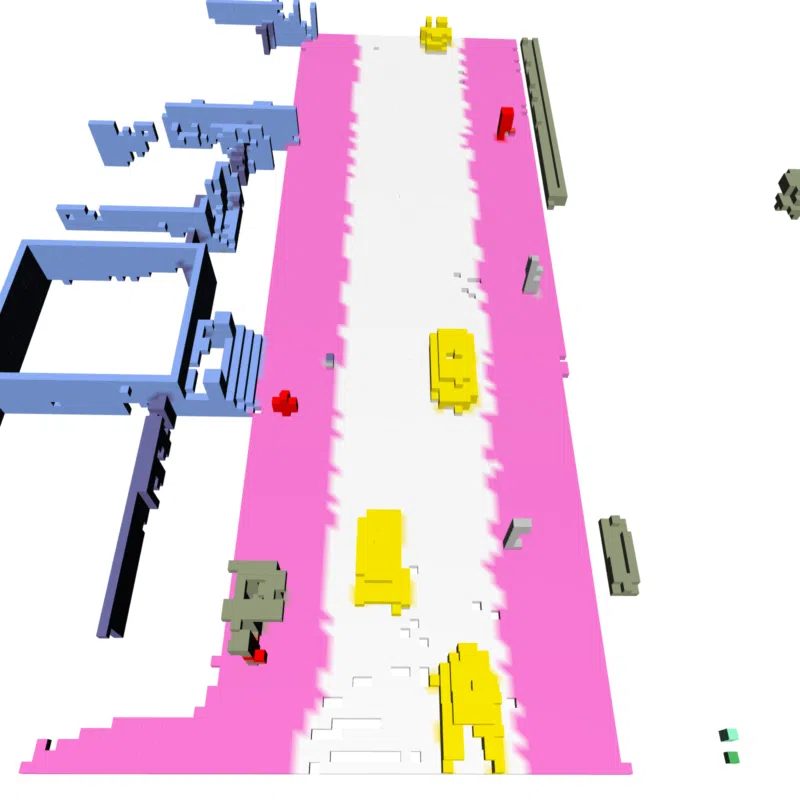
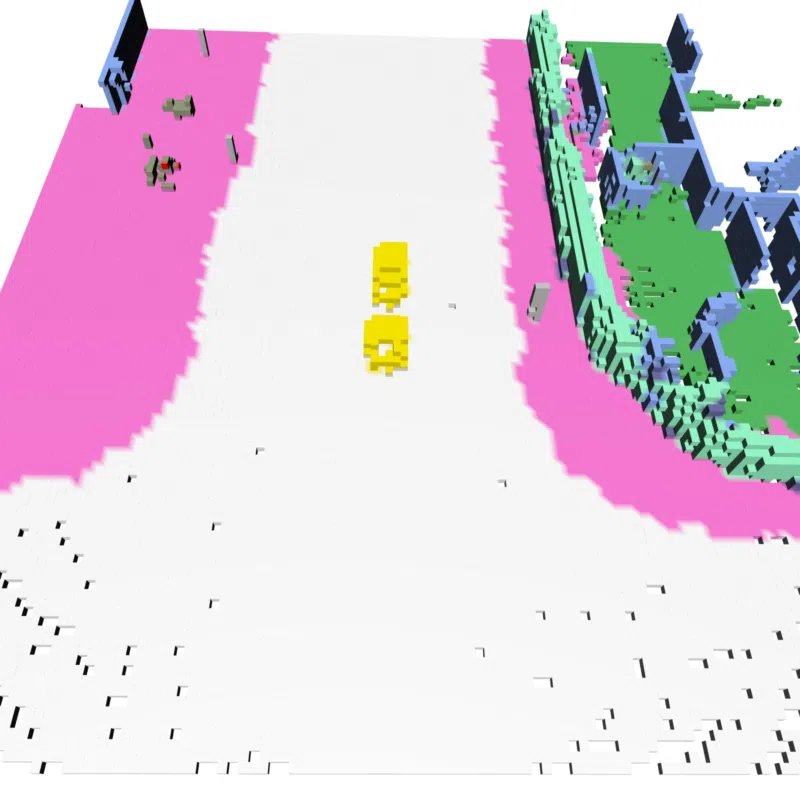
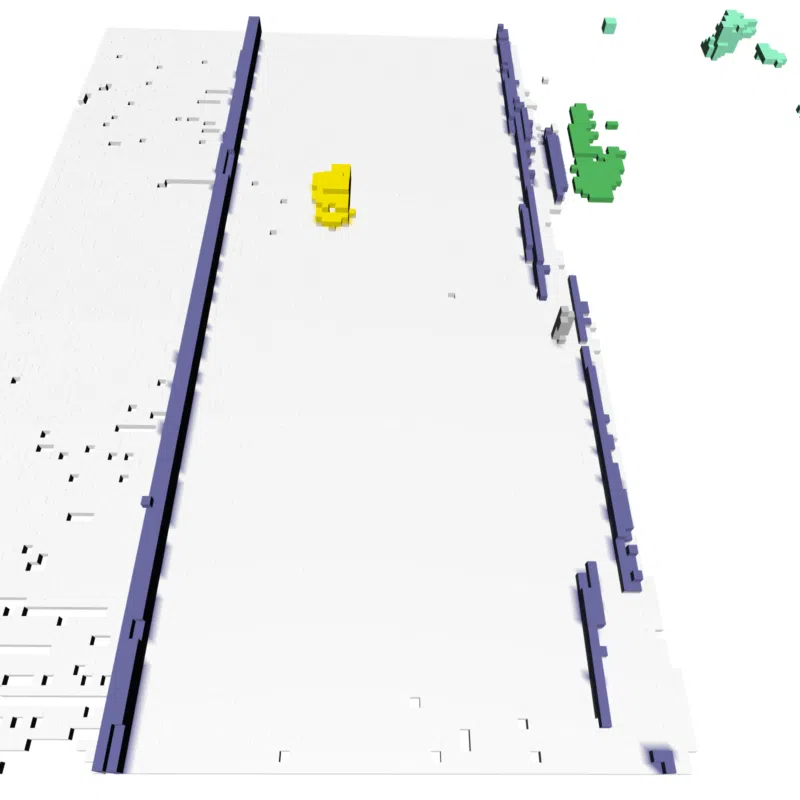
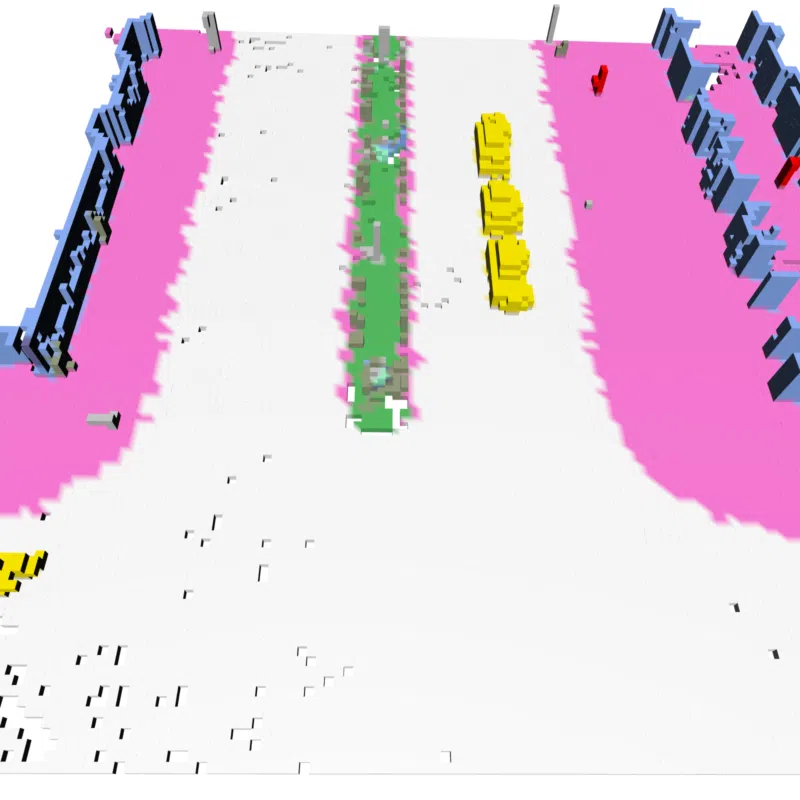
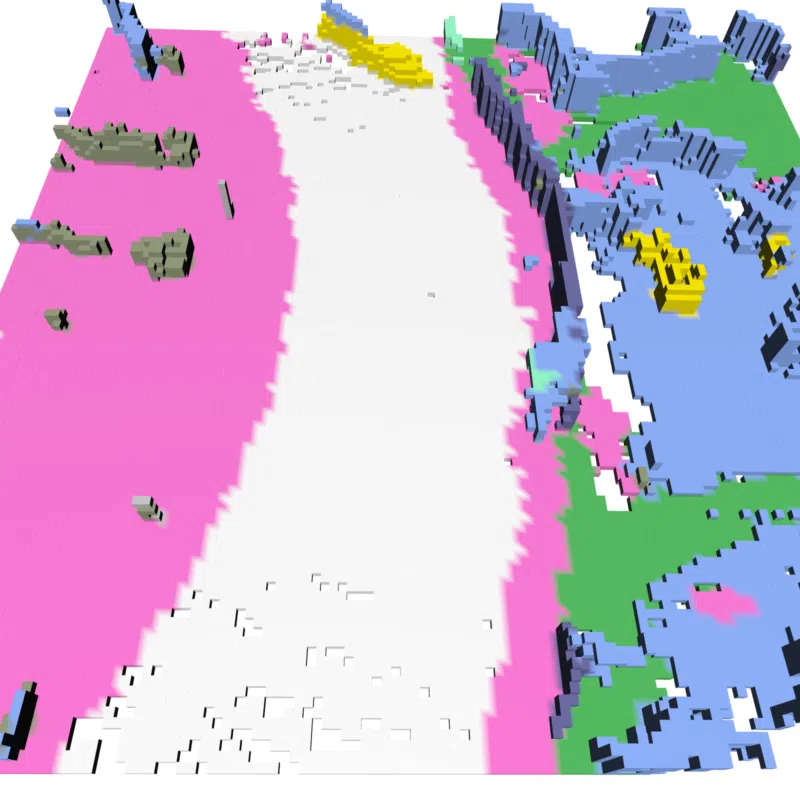
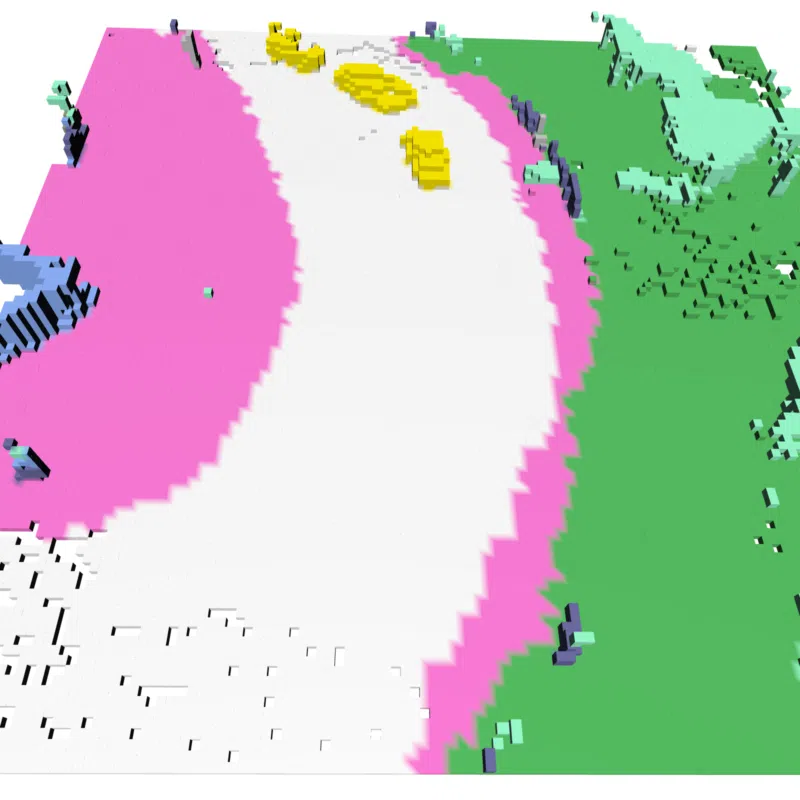
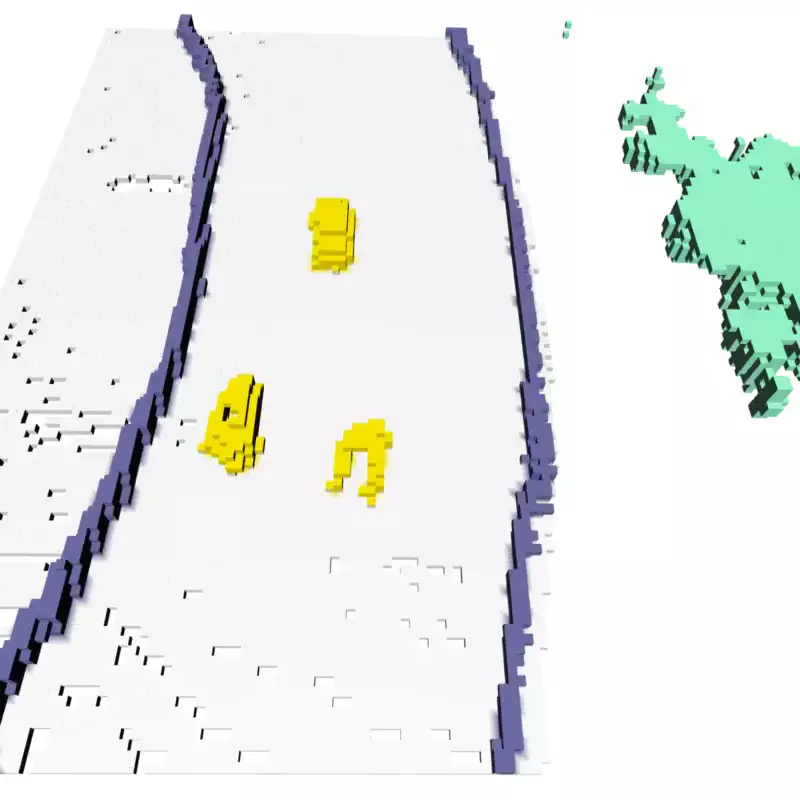
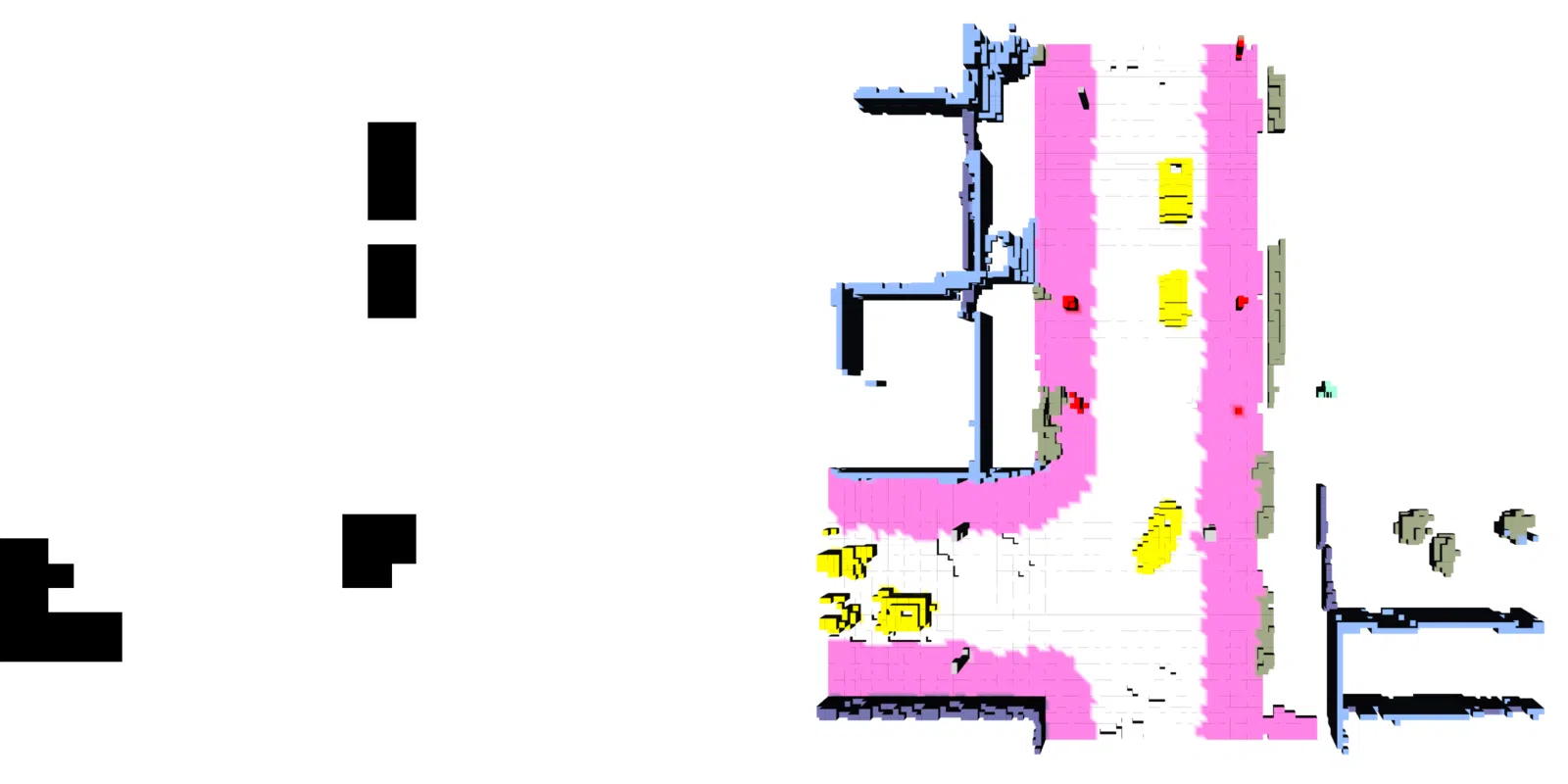
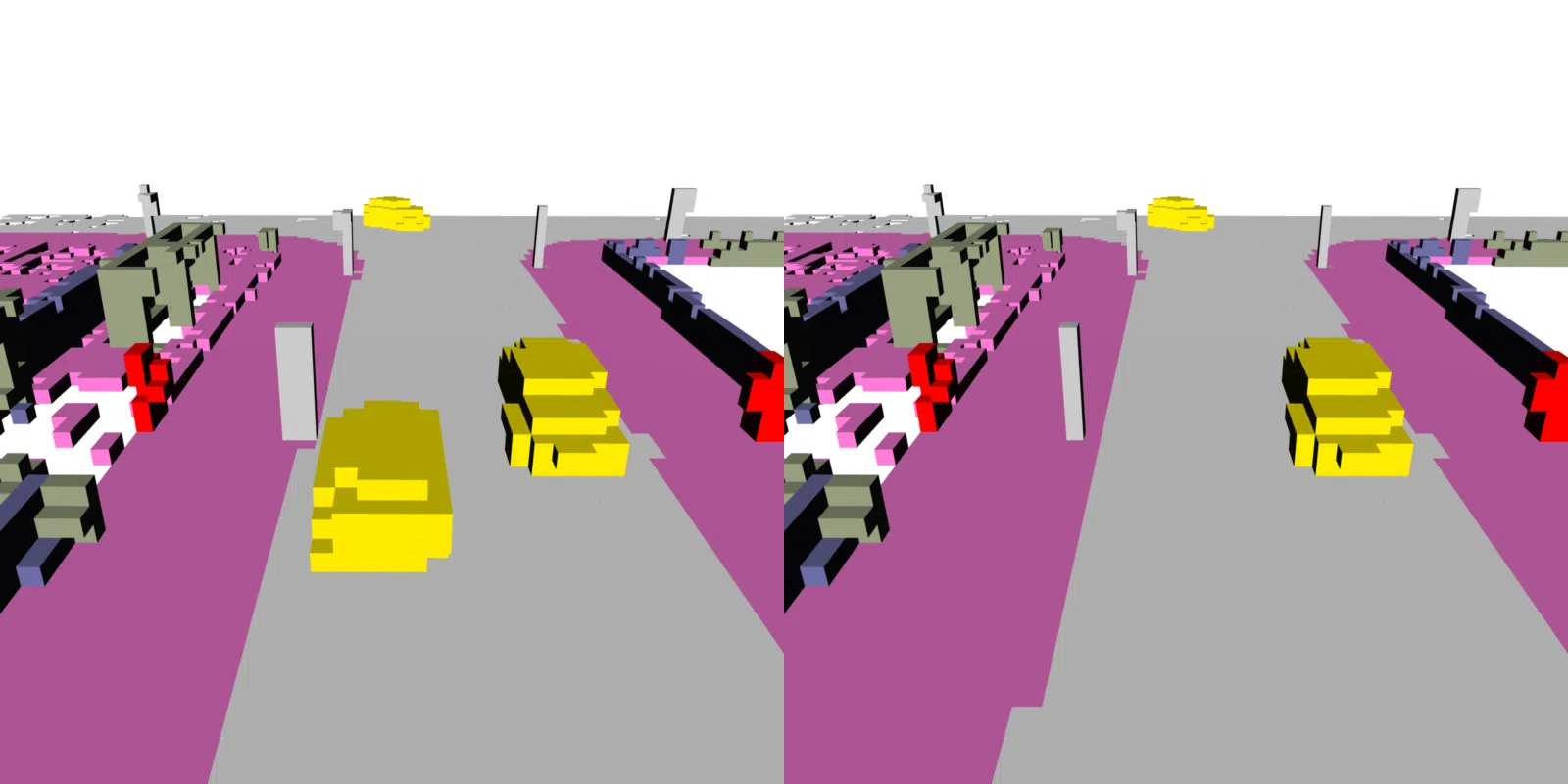
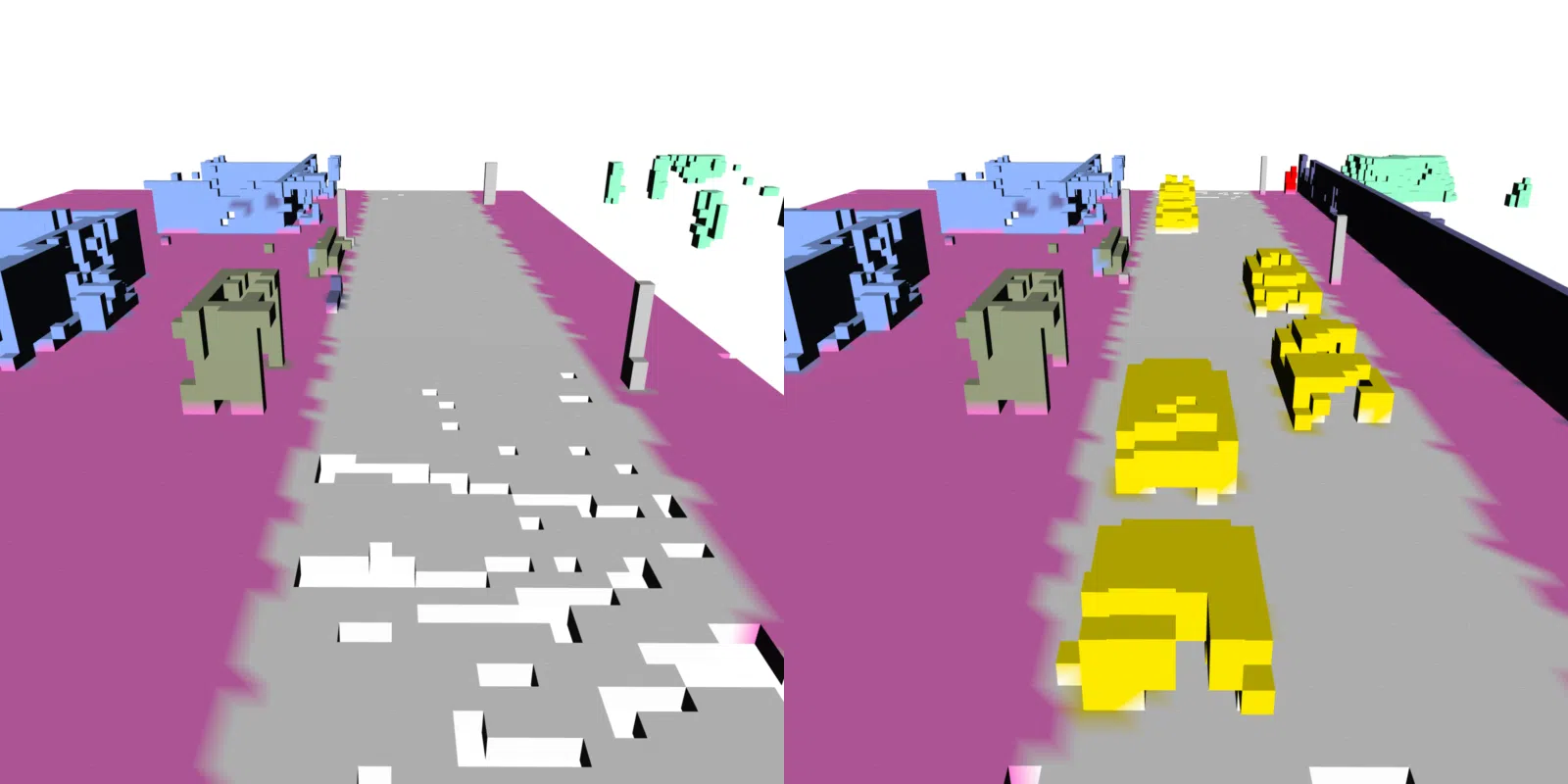
work, we introduce **DynamicCity**, a novel 4D occupancy generation framework capable of generating large-scale,
high-quality dynamic 4D scenes with semantics. DynamicCity mainly consists of
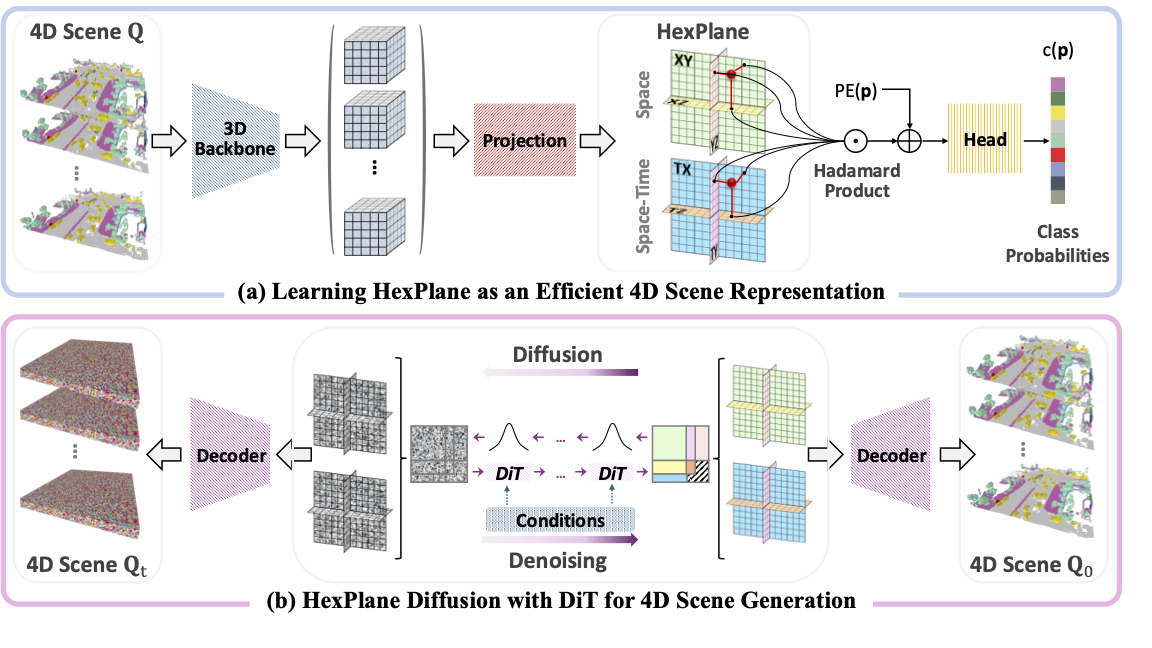
two key models: 1. A VAE model for learning HexPlane as the compact 4D representation. Instead of using naive averaging
operations, DynamicCity employs a novel **Projection Module** to effectively compress 4D features into six 2D
feature maps for HexPlane construction, which significantly enhances HexPlane fitting quality (up to **12.56** mIoU
gain). Furthermore, we utilize an **Expansion & Squeeze Strategy** to reconstruct 3D feature volumes in parallel, which
improves both network training efficiency and reconstruction accuracy than naively querying each 3D point (up to **7.05**
mIoU gain, **2.06x** training speedup, and **70.84%** memory reduction). 2. A DiT-based diffusion model for HexPlane
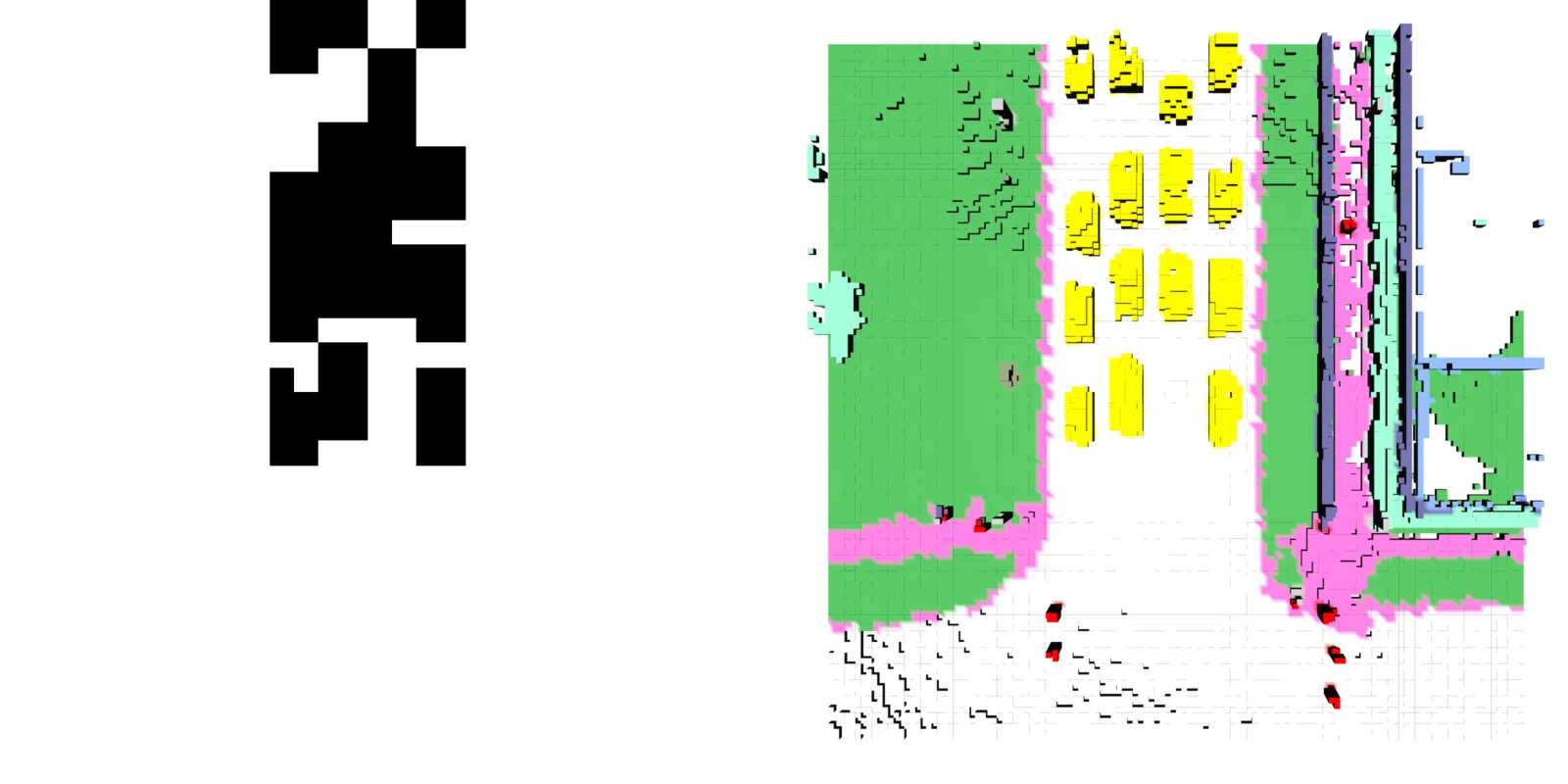
generation. To make HexPlane feasible for DiT generation, a **Padded Rollout Operation** is proposed to reorganize all
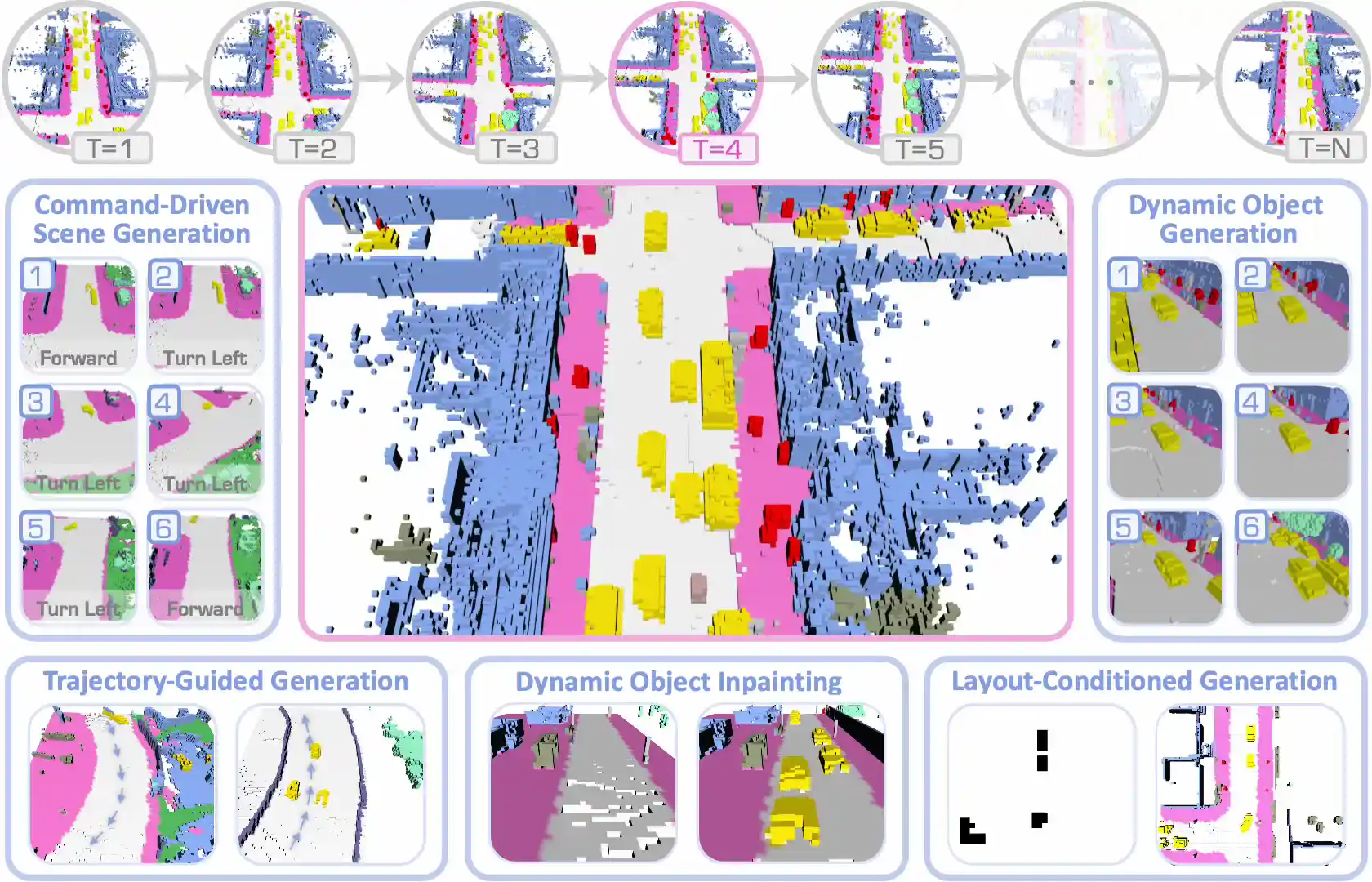
six feature planes of the HexPlane as a squared 2D feature map. In particular, various conditions could be introduced in
the diffusion or sampling process, supporting **versatile 4D generation applications**, such as trajectory- and
command-driven generation, inpainting, and layout-conditioned generation. Extensive experiments on the CarlaSC and Waymo
datasets demonstrate that DynamicCity significantly outperforms existing state-of-the-art 4D occupancy generation methods
across multiple metrics. The code and models have been released to facilitate future research.
Overview
Our DynamicCity framework consists of two key procedures: (a) Encoding HexPlane with an VAE architecture,
and (b) 4D Scene Generation with HexPlane DiT.
If you find this work helpful for your research, please kindly consider citing our papers:
@inproceedings{bian2025dynamiccity,
title={DynamicCity: Large-Scale 4D Occupancy Generation from Dynamic Scenes},
author={Bian, Hengwei and Kong, Lingdong and Xie, Haozhe and Pan, Liang and Qiao, Yu and Liu, Ziwei},
booktitle={Proceedings of the International Conference on Learning Representations (ICLR)},
year={2025},
}
About
[ICLR 2025 Spotlight] Official implementation for "DynamicCity: Large-Scale 4D Occupancy Generation from Dynamic Scenes"