| CARVIEW |
Navigation Menu
-
-
Notifications
You must be signed in to change notification settings - Fork 56.2k
search in two directions when try to add new quad in addOuterQuad #25807
New issue
Have a question about this project? Sign up for a free GitHub account to open an issue and contact its maintainers and the community.
By clicking “Sign up for GitHub”, you agree to our terms of service and privacy statement. We’ll occasionally send you account related emails.
Already on GitHub? Sign in to your account
Conversation
…d in function addOuterQuad
|
Since it's not an usual algorithm, so i have made a simple note image to show how it happends: |

|
@MaximSmolskiy Could you take a look and try with your dataset? |
1 similar comment
|
@MaximSmolskiy Could you take a look and try with your dataset? |
@asmorkalov I didn't deal with this function, so I amn't ready to review this pr.
|
|
@MaximSmolskiy Thanks a lot for the feedback. The patch does not change result of synthetic benchmark. Just want to get feedback for real images. |
Search in two directions when try to add new quad in addOuterQuad opencv#25807 In ChessBoardDetector::addOuterQuad, previous code try to connect new quad with inner quad, if possible, but only search for one direction. I have made three test images, one is normal(a.jpg), one lossed an outer quad(b.jpg), and then i flipped it vertically(c.jpg). Only last one fails. I fixed it by check two directions and row/col. Here is the test code and images: ``` Mat img; vector<Point2f> corners; auto size = cv::Size(6, 6); img = imread("D:/tmp/a.jpg", 0); std::cout<<cv::findChessboardCorners(img, size, corners)<<"\n"; std::cout << corners.size() << "\n"; img = imread("D:/tmp/b.jpg", 0); std::cout<<cv::findChessboardCorners(img, size, corners)<<"\n"; std::cout << corners.size() << "\n"; img = imread("D:/tmp/c.jpg", 0); std::cout<<cv::findChessboardCorners(img, size, corners)<<"\n"; std::cout << corners.size() << "\n"; ```  a 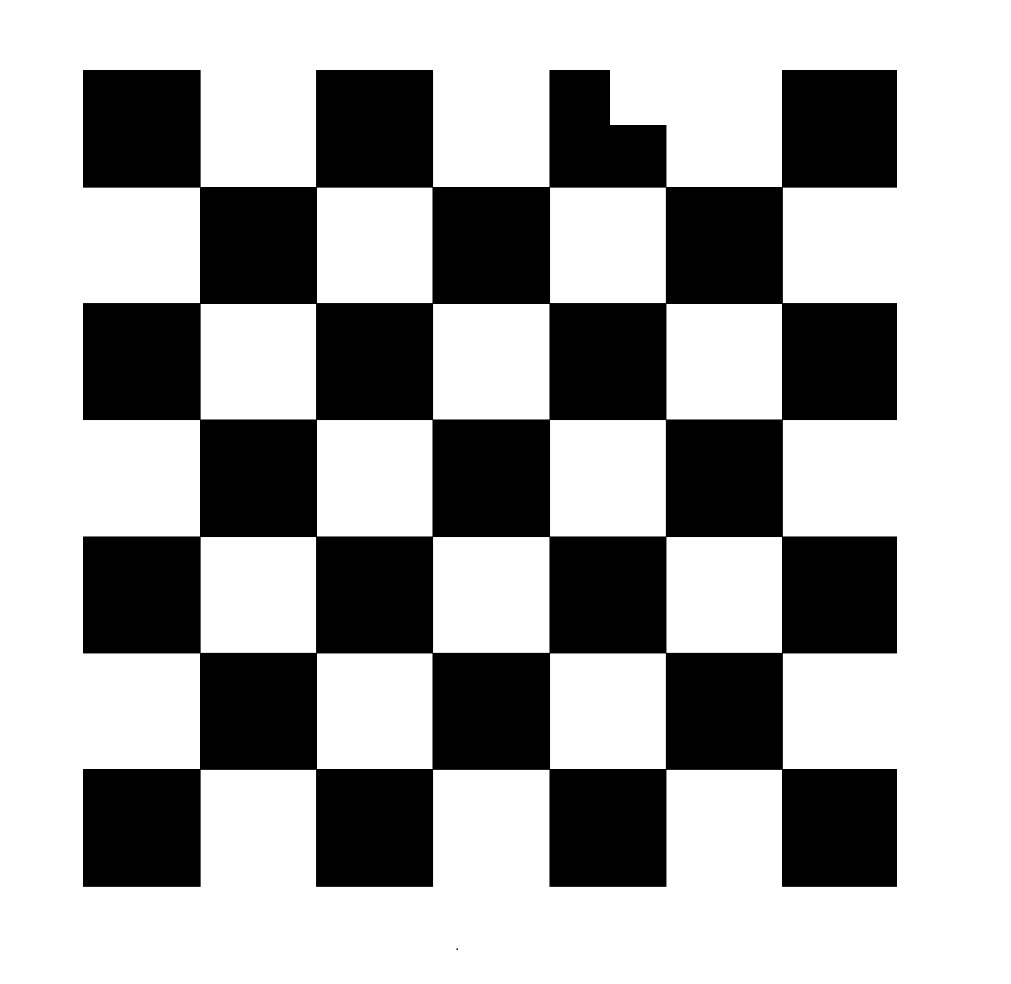 b  c
Search in two directions when try to add new quad in addOuterQuad opencv#25807 In ChessBoardDetector::addOuterQuad, previous code try to connect new quad with inner quad, if possible, but only search for one direction. I have made three test images, one is normal(a.jpg), one lossed an outer quad(b.jpg), and then i flipped it vertically(c.jpg). Only last one fails. I fixed it by check two directions and row/col. Here is the test code and images: ``` Mat img; vector<Point2f> corners; auto size = cv::Size(6, 6); img = imread("D:/tmp/a.jpg", 0); std::cout<<cv::findChessboardCorners(img, size, corners)<<"\n"; std::cout << corners.size() << "\n"; img = imread("D:/tmp/b.jpg", 0); std::cout<<cv::findChessboardCorners(img, size, corners)<<"\n"; std::cout << corners.size() << "\n"; img = imread("D:/tmp/c.jpg", 0); std::cout<<cv::findChessboardCorners(img, size, corners)<<"\n"; std::cout << corners.size() << "\n"; ```  a  b  c
In ChessBoardDetector::addOuterQuad, previous code try to connect new quad with inner quad, if possible, but only search for one direction. I have made three test images, one is normal(a.jpg), one lossed an outer quad(b.jpg), and then i flipped it vertically(c.jpg). Only last one fails. I fixed it by check two directions and row/col.
Here is the test code and images:
a
b
c